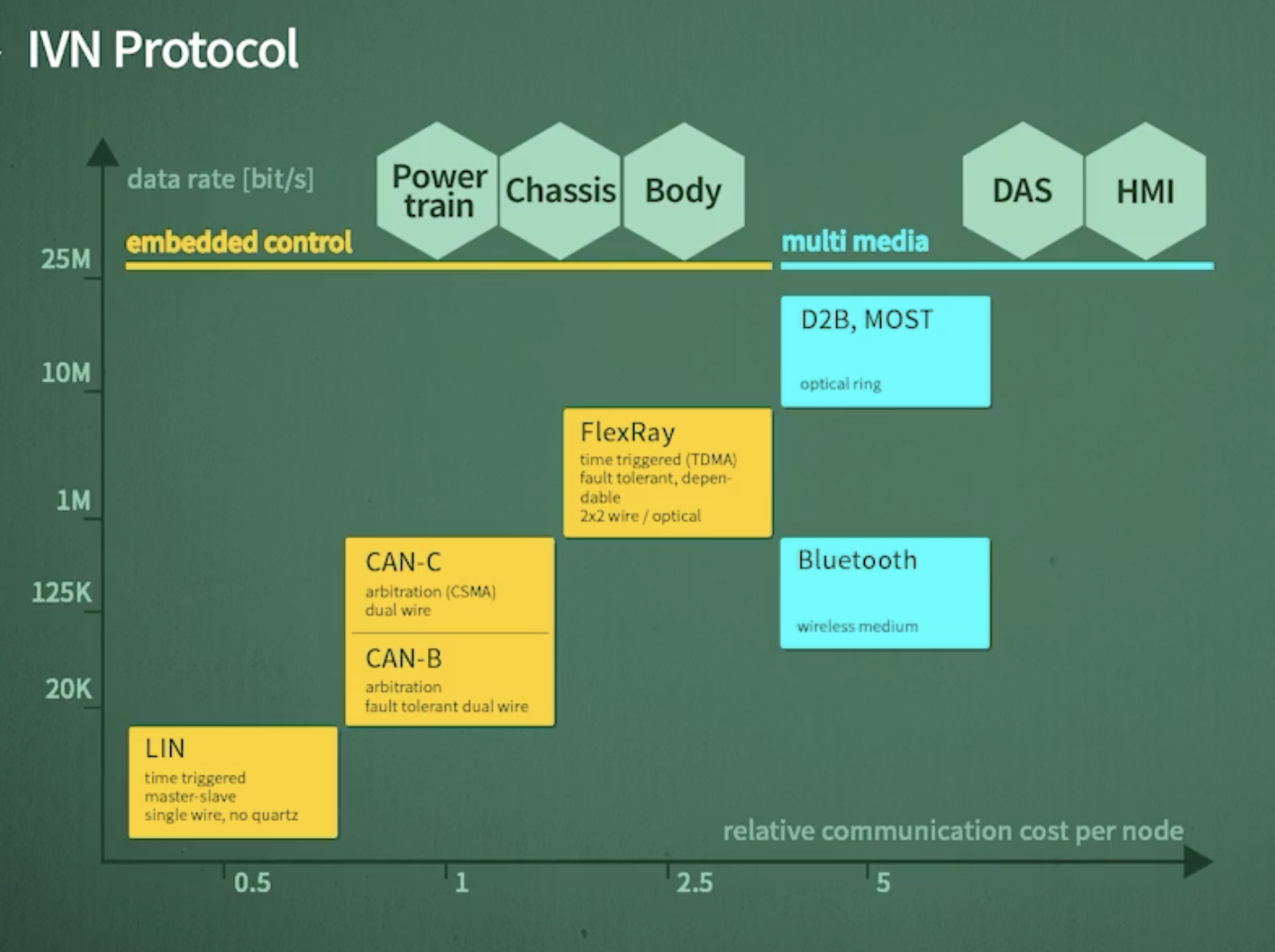
CAN
30년 넘게 사용 차량의 특성을 잘 반영, 안정성, 신뢰성이 제일 중요하다보니..
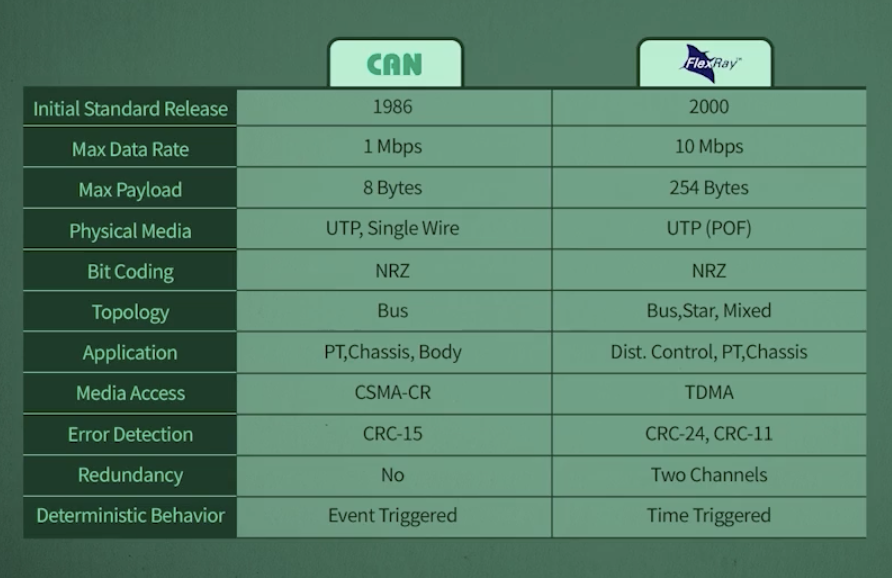
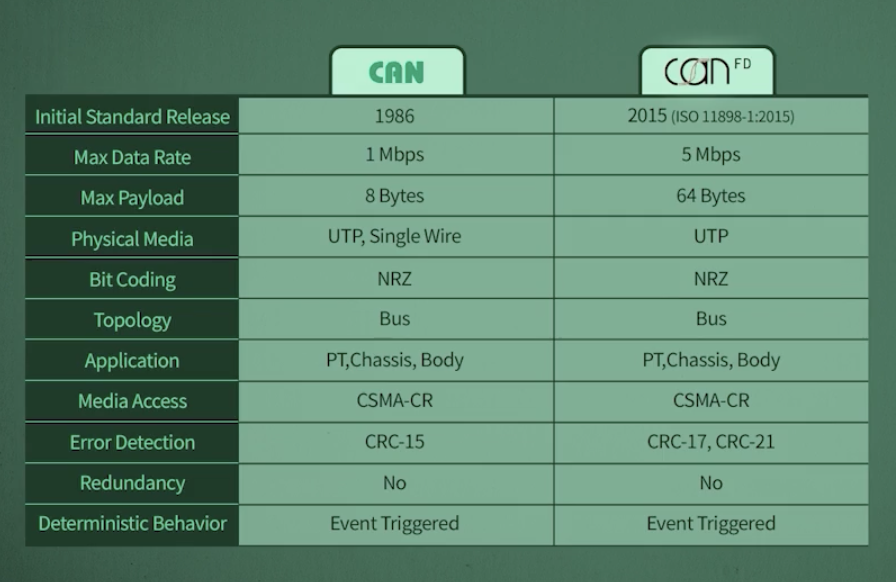
1Mbps -> 1초당 100만 bit를 보낼 수 있음
현재 관점에서 보면 광장히 느리지만, 그 당시에는 필요이상으로 빨랐음
실제 적용은 500kbps를 함 -> 신뢰성 향상, 스피드 충족
최대 정보의 크기(Maximum Payload) 8byte, 64bit
정보 전송시 구리선 1줄 Single Wire CAN은 실제로 X -> 구리선 2줄
Shieled Cable -> 노이즈 발생 감소, 노이즈 영향 감소 [가격이 비쌈] 그래서, 아래를 사용함 Unshieled Cable -> 노이즈 발생시 에러 발생 가능성 높음 [가격이 월등히 쌈]
두 개의 케이블 나란히 쓰지 않고, 꼬아서 사용함 -> UTP(Unshieled Twist Pair) [대부분의 차량 네트워크 선]
비트코딩 -> NRZ(Non Return to Zero) 사용함
Toplogy -> Bus Topology (구리선에 어떤 방식으로 ECU를 연결할 것인가?)
CAN 적용 영역 -> PT,Chassis,Body
Media Access(구리선을 차지하는 방식) -> CSMA, CR CS : Carrier Sense -> 구리선에 �전송되는 정보 유출 감지 MA : Mutiple Access -> 2개 이상의 ECU가 동시에 전송 가능 CR : Collision Resolution -> 충돌이 발생했을 때, 누가 우선권을 가지는가?
CRC -> Cyclic Redundancy Check 에러 검출 방식 중 하나[뒤에서 공부 링크]
Deterministic Latency -> 정해진 시간 내에 정보가 도착해야 함 실시간성이 중요한 차량 네트워크에서 매우 중요한 요소 CAN은 없음 그래서 Deterministic Behavior가 없다라고 표현. 부하율이 높지 않을 때는 사용하는데 큰 문제가 없음
FlexRay(CAN의 단점보완)
10Mbps -> 1초당 1000만 bit 전송 가능
최대 정보의 크기(Maximum Payload) 254byte, 2032bit
등장이유? ECU가 많아지고, 데이터 전송량이 많아짐 -> CAN의 한계 극복
UTP(Unshieled Twist Pair) 사용
비트코딩 -> NRZ(Non Return to Zero) 사용함 전압 형태는 다르다.
Toplogy -> Bus Topology (구리선에 어떤 방식으로 ECU를 연결할 것인가?) Star, Mixed Topology 지원
Apllication -> Dist.Control,PT,Chassis(Hard Real Time에 적용하기 위해서 개발된 기술)
Media Access(구리선을 차지하는 방식) -> TDMA, FTDMA TDMA -> Time Division Multiple Access FTDMA -> Flexible Time Division Multiple Access [그림] 시간을 정해서 각 ECU가 정보를 보내는 => 충돌이 발생하지 않음
Error Detection -> CRC 2개 사용
2 Channel 지원 에러 발생 유무를 부가적으로 체크
Time Triggerd 방식 -> Deterministic Behavior 100%
Lin(Local Interconnect Network)
2002년 나옴 20kbps -> 1초당 2000 bit 전송 가능
Actuator - ECU - Sensor 간의 통신에 주로 사용됨 -> 빠른 스피드 필요 없음
CAN을 사용하기엔 아까운 분야에 사용하자!
최대 정보의 크기(Maximum Payload) 8byte
Single Wire 사용 (가격 절감)
BitCoding : NRZ(Non Return to Zero) 사용함
Toplogy -> Bus Topology
Application -> Sensor, Actuator 통신
Master-Slave 방식
Error Detection -> Checksum 사용
정해진 시간에 정보 전송 -> Deterministic Behavior 지원 1h=60분이 아닌 65,70분 들쭉날쭉함
CAN-FD(Flexible Data Rate)
2018 기준 MCU칩 : 최대스피드 = 5Mbps ~
최대 정보의 크기(Maximum Payload) 64byte, 512bit
UTP(Unshieled Twist Pair) 사용
비트코딩 -> NRZ(Non Return to Zero) 사용함(CAN과 동일)
Toplogy -> Bus Topology
Apllication 동일(CAN과 동일)
Media Access -> CSMA, CR(CAN과 동일)
CRC -> Cyclic Redundancy Check 다만, 17,21bit 사용 데이터 길이가 16byte 이하면 17bit, 16byte 초과시 21bit 사용
Redundancy 없음 Deterministic Behavior 없음
OPEN(One Pair EtherNet)
One pair -> 구리선 2줄(1쌍)[배선의 가격과 밀접한 관련] 구리선 두 줄 사용시 차량의 잡음 요건을 만족 시키는 기술
2011년에 재정
100Mbps -> 1초당 1억 bit 전송 가능 1Gbps 기술도 개발
최대 정보의 크기(Maximum Payload) 1,500byte
UTP(Unshieled Twist Pair) 사용
Bit Coding -> 4B/3B...
Star Topology 지원
Apllication : Diagonostic, ECU Prog, Backbone(네트워크의 허리 중추 역할)
Media Access : Switched Full Duplex 방식
CRC 방식으로
Deterministic Behavior 없음
PTP사용 하거나 AVB사용해야함 TSN(Time Sensitive Networking) 적용 필요